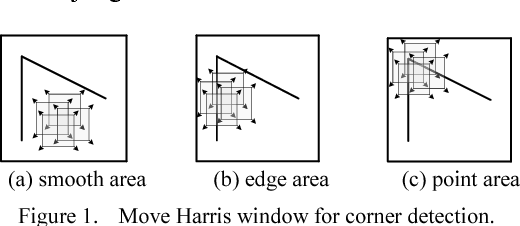
A corner is detected if it witnesses a gradient in multiple directions.
The pipeline consists of:
- Compute gradients: Ix = ∂I/∂x, Iy = ∂I/∂y (using Sobel or similar)
- Compute products: Ix², Iy², Ix·Iy
- Apply Gaussian weighting: w * Ix², w * Iy², w * Ix·Iy
- Compute R for each pixel
- Non-maximum suppression (keep local maxima)
- Threshold R > threshold → corners