Measures linear acceleration and angular velocity with 3 orthogonal accelerometers and 3 orthogonal gyros.
Modern IMUs use MEMs Technology (Micro-Electro-Mechanical Systems).
Accelerometers are proof masses and springs Gyros are vibrating proof masses that detect Coriolis Force when rotating
If you have a system
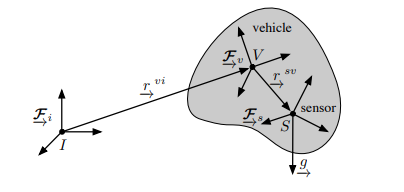
Its sensor model (assuming we want the acceleration and angular velocity of the vehicle not the sensor) is
\begin{bmatrix} \mathbf{a} \\ \boldsymbol{\omega} \end{bmatrix} = \mathbf{s}\left(\mathbf{r}_i^{vi}, \mathbf{C}_{vi}, \boldsymbol{\omega}_i^{vi}, \mathbf{r}_i^{vi}, \dot{\boldsymbol{\omega}}_i^{vi}\right) $$ $$ = \begin{bmatrix} \mathbf{C}_{vi}\left(\mathbf{C}_{iv}\left(\ddot{\mathbf{r}}_i^{vi} - \mathbf{g}_i\right) + \dot{\boldsymbol{\omega}}_i^{vi} \times \mathbf{r}_i^{vi} + \boldsymbol{\omega}_i^{vi} \times \boldsymbol{\omega}_i^{vi} \times \mathbf{r}_i^{vi}\right) \\ \mathbf{C}_{vi}\boldsymbol{\omega}_i^{vi} \end{bmatrix}