A tree structure that models the switching of different tasks in an autonomous agent.
There are a number of key benefits a behavior tree has over a Finite State Machine.
1. They are inherently hierarchical: a bigger tree can be composed of smaller sub-branches of reusable behaviours. 2. Their graphical representation has a semantic meaning: its readable…? someone said this, its kinda readable i guess once you get use to it.
Fundamentally, the behaviour tree functions off a tick. This tick is periodic and travels from the root of the tree down to the behaviour to execute.
There are different types of nodes in a behaviour tree.
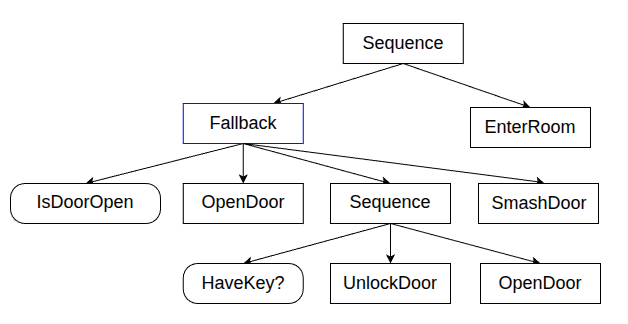
- Control Node (many children) ticks a child based on the result of its siblings or its own state. These nodes control the flow of the ticks (ie. Fallback Node, or Sequence Node)
- Decorator Node (1 child) alters the result of its child or tick it multiple times
- Condition Node (no child) does not alter the system, return SUCCESS, FAILURE but not RUNNING
- Action Node (no child) a node that does something