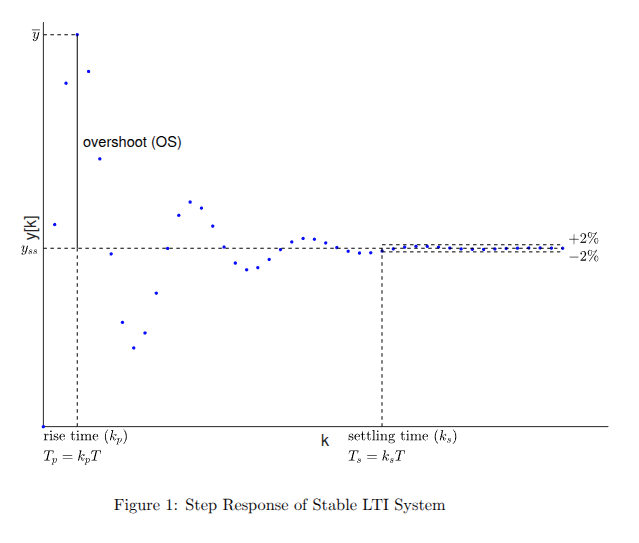
We could care for a couple of things… overshoot settling time rise time steady state error gain/phase margins bandwidth limits on input / output physical limits (saturations, the motors can only move so far up and down) safety limits (engineered)