Sampled-Data (Digital) Control Systems
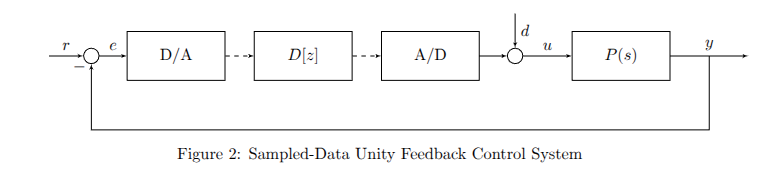
Here we have a controller that requires Digital/Analog conversions.
- discrete-time controller
- are all in continuous time
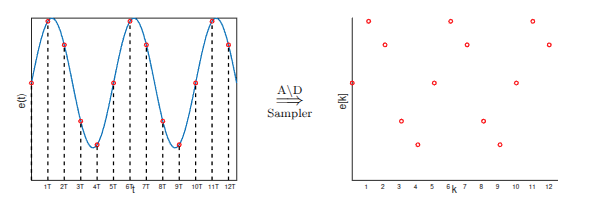
- A/D is the sampler (analog to digital converter)
- samples at discrete intervals
- T is the sampling time of the system
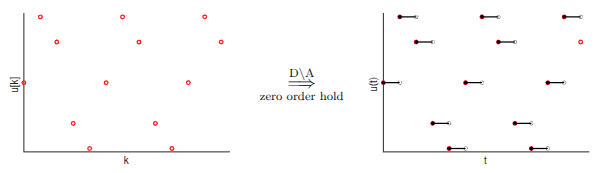
- D/A is the zero order hold (Digital to Analog converter)
- holds for
This system in NOT LTI (Linear Time Invariant)! Thats becuase the signal can change if you shift the time off a bit (will sample and hold completely different signals)
As a result, what do we do?
- Attempt to choose a sampling time of the control architecture in such a way to make the system as LTI as possible
- Utilize LTI tools anyways
- Approximating continuous time controllers with discrete controllers
- or by directly designing a discrete controller
- Analyze and simulate the results on the simulated true system (accounting for the samplers and holders)
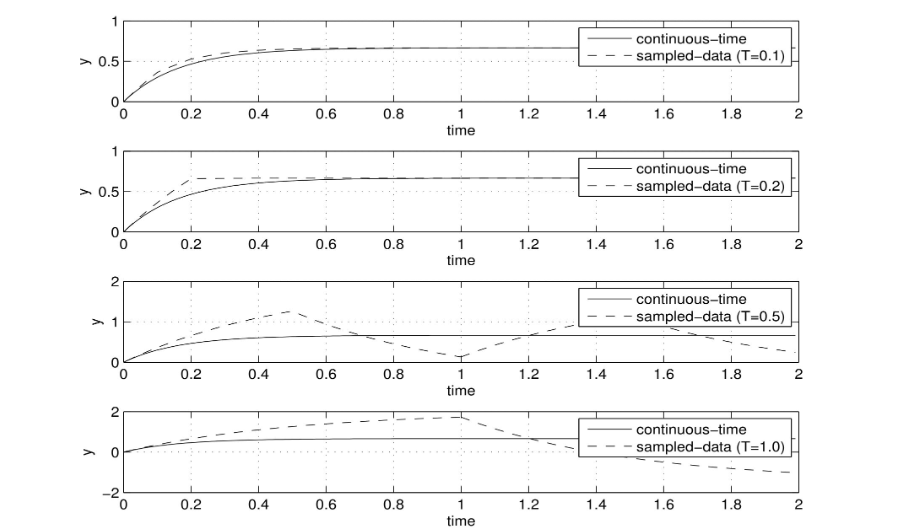
Example
- Our sampler gets worse and worse the higher the frequency of the input signal.
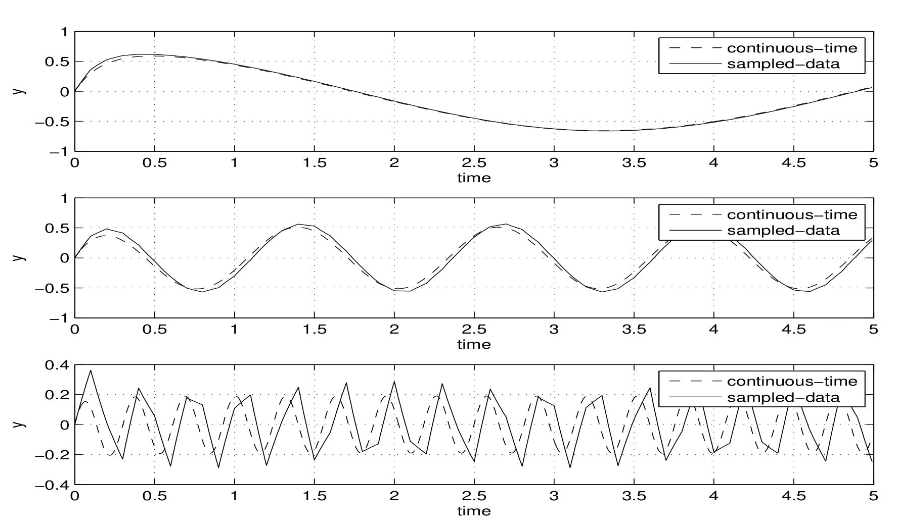
- We can cause instability if our sampling time is too long