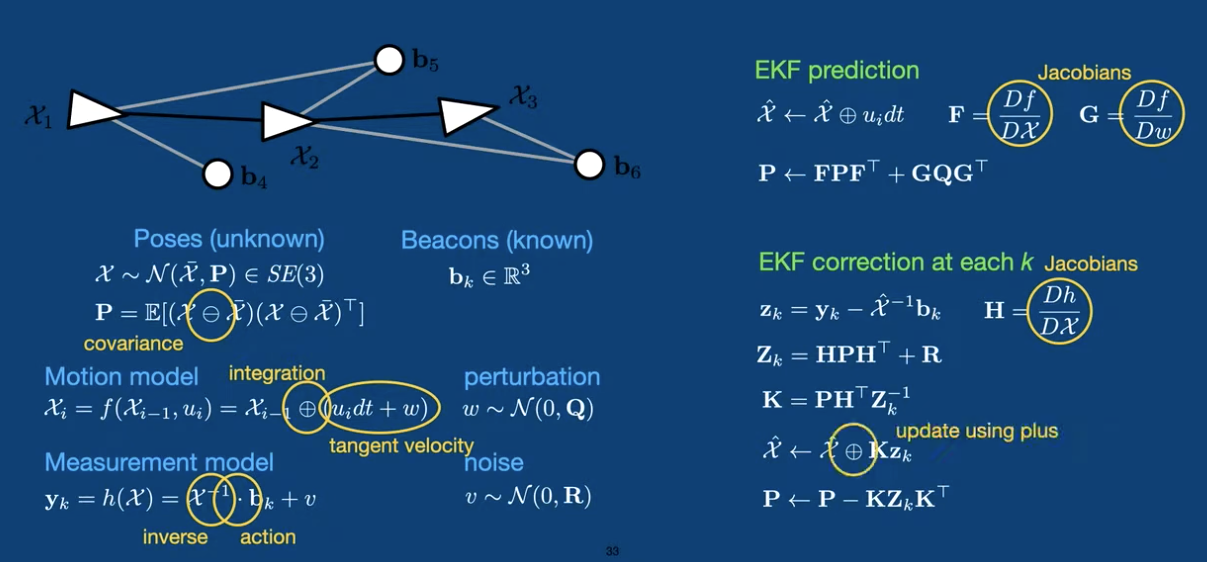
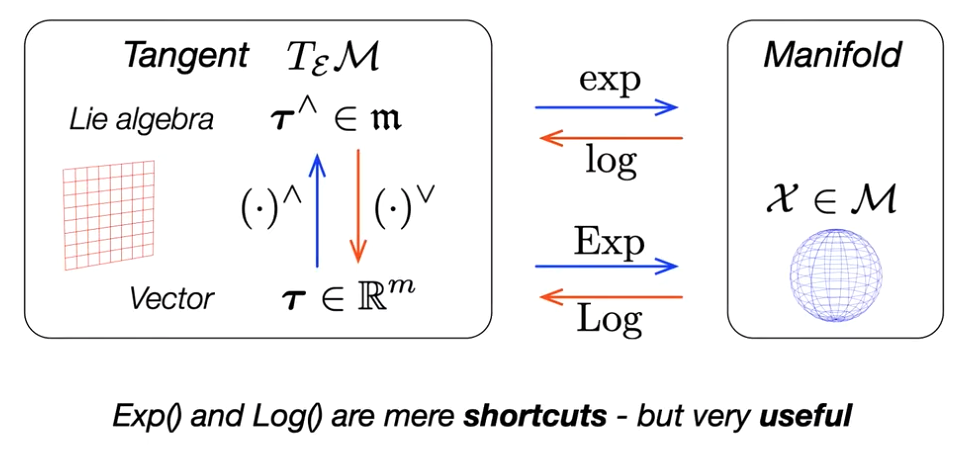
Using SE(3) we can implement an Extended Kalman Filter with a better 1st order approximation. Review Lie Algebra to get a better idea of what the fuck is going on. After that, you should now know that you have a whole set of tools useful for doing State Estimation on SE(3)
Reminder
Setup