Up to now, we have been characterizing the stability of just a plant. But what if we add feedback into the mix?
Setup
We have the following systems in continuous and discrete time.
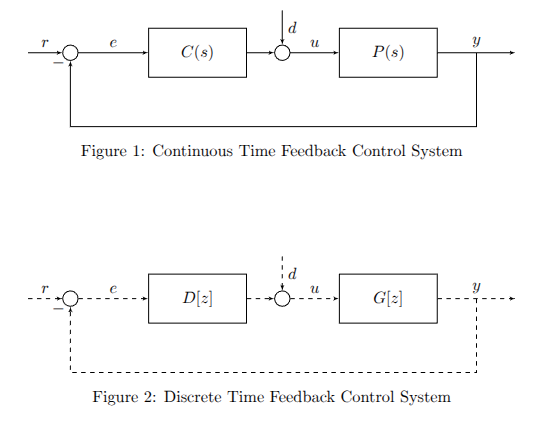
From this diagram, we have a BUNCH of Transfer functions that we are dealing with:
- : Transfer function between the reference signal and the system output
- : Transfer function between the reference signal and the input into the controller
- : Transfer function between the reference signal and the input to the plant
- : Transfer function between the disturbance and the output of the system
- : Transfer function between the disturbance and the input to the controller
- : Transfer function between the disturbance and the input to the plant
THESE ARE CALLED CLOSED LOOP TRANSFER FUNCTIONS from external signals to internal ones.
Fun fact from Final Value Theorem
You can derive all the transfer functions from first principles. They end up being the following (represented as a matrix multiplication).
Continuous Time
Discrete Time
A feedback system is WELL POSED if all closed-loop transfer functions from external signals to internal ones are real, rational, and proper
Definition of Closed Loop Stability
A closed-loop system is closed-loop stable if internally stable if all closed loop transfer functions from external signals to internal ones are BIBO stable.
- same as saying that for any bounded external signal (), the corresponding internal signals () are also bounded
- (the error is given by the reference signal minus the output signal) which means that so long as and are bounded, then is bounded and thus you dont need to prove that transfer functions to e are BIBO stable because they are
- similarly so same reasoning applies
- This means that you can either prove that the transfer functions
- (r, d) to (u, y) are all stable (and (r, d) to (e) are implied to be stable)
- or (r, d) with (u, e) (and (r, d) to (y) are implied to be stable)